1 摄像头
优点:技术成熟,成本低,采集信息丰富
缺点:受光照、环境影响大,难以全天候工作;缺乏深度信息
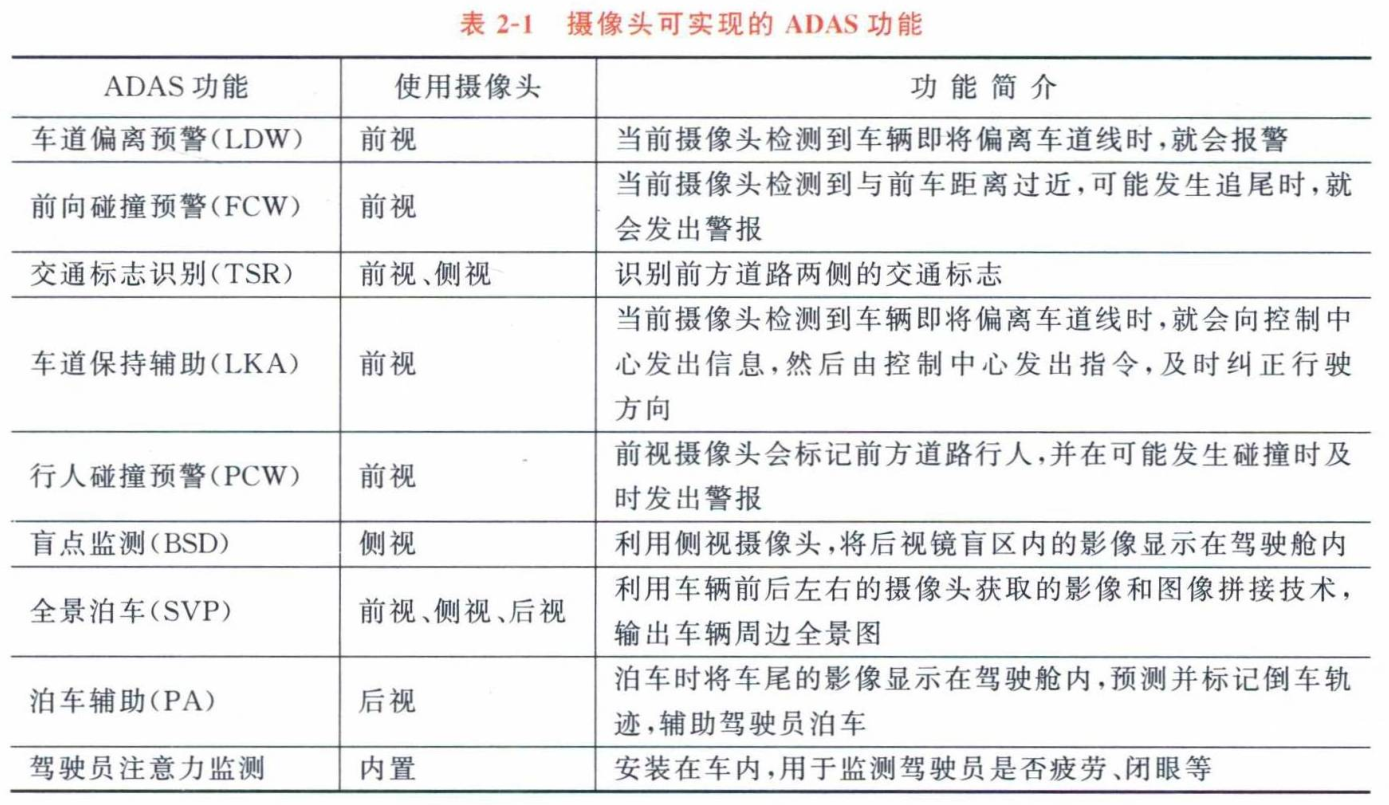
前视摄像头一般安装在车内后视镜上或者前挡风玻璃上较高的位置。
2 激光雷达
LiDAR(Light Detection and Ranging)是以发射激光束探测目标的位置、速度等特征量的雷达系统。
优点:
- 分辨率高,精度高。角分辨率可达 $0.1\degree$,也就是说可以分辨 3km 距离上相距 5m 的两个目标,并可同时跟踪多个目标;距离分辨率可达 0.1m。
- 抗有源干扰能力强。与微波雷达易受自然界广泛存在的电磁波影响不同,自然界中能对激光雷达产生干扰的信号源不多。
- 获取信息丰富。可以直接获得目标的距离、角度、反射强度、速度等信息。
缺点:
- 雨雪、雾霾天气精度下降。在大雨、浓雾里激光衰减急剧增大,传播距离大受影响。
- 没有纹理信息,难以分辨交通标志和红绿灯。
- 易受太阳光、其他车辆的激光雷达等的光线影响。
- 现阶段成本高
3 毫米波雷达
毫米波雷达频率通常在 30~300GHz(波长为 1~10mm),波长介于厘米波和光波之前。毫米波雷达具有较强的穿透性,能够轻松穿透塑料,常被安装在汽车的保险杠内。
毫米波雷达采集的原始数据基于极坐标系,与 LiDAR 的笛卡尔坐标系不同。
毫米波雷达可能精确测量自动驾驶汽车与周边车辆之间的距离。
优点:
- 高分辨率,小尺寸。
- 相比于红外、激光等光学导引头,毫米波导引头穿透雾、烟、灰尘的能力强,测距精度受天气和环境影响小。
- 与红外系统相比,毫米波雷达可以直接测量距离和速度信息。
缺点:
- 与微波雷达相比,毫米波雷达的发射机功率低,波导器件中的损耗大。
- 行人的后向散射截面较弱,如果要探测行人,探测阈值需要设低,负面效应是可能会有更多虚报物体出现。
- 器件昂贵,现阶段不能大批量生产装备
4 超声波雷达
超声波雷达发射并接收 40kHz 的超声波,根据时间差算出障碍物距离,其测距精度大约是 1~3cm。常见的超声波雷达分为两种:
-
安装在前后保险杠上,用于测量前后障碍物的倒车雷达,称为超声波驻车辅助传感器(Ultrasonic Parking Assistant,UPA)。UPA 的探测距离一般在 15~250cm。
-
安装在车身侧面,用于测量侧方障碍物距离,称为自动泊车辅助传感器(Automatic Parking Assistant,APA)。APA 的探测距离一般在 30~500cm。
优点:
- 穿透力强,防水、防尘且不受光线条件影响
- 原理简单,成本低
缺点:
- 对温度敏感
- 超声波散射角大,方向性差,无法精确描述障碍物位置
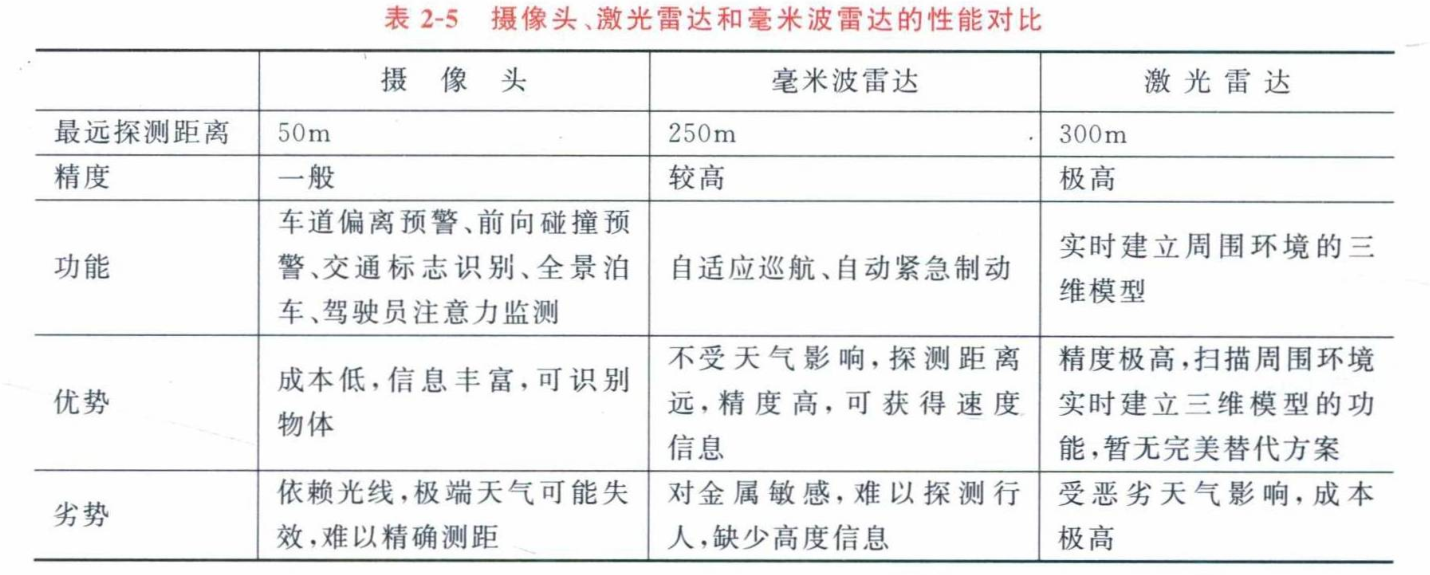
5 对比
6 参考资料
《自动驾驶-汽车环境感知》
本文由 晓楼 创作,采用 知识共享署名4.0 国际许可协议进行许可。本站文章除注明转载/出处外,均为本站原创或翻译,转载前注明出处