如何让一辆车保持匀速行驶?
朴素的想法是速度低了就加油,高了就刹车。还可以精细一点,速度离目标值差的越多,加油/刹车就越猛;越接近目标,加油/刹车就越慢。也就是说,控制力度和当前值与目标值的差值成比例关系。这就是比例控制,让偏差(目标减去当前)与控制装置的输入建立一个一次函数的关系。控制输入 kP 越大,调节作用越激进,反之越保守。
现实世界中的系统总是会受到各种外界因素的影响。比如车辆速度会受到摩擦力、风速、上下坡等影响。如果撤去油门,车辆就会在外界影响下减速。按比例控制的方式,随着车速越来越接近目标值,控制输入越来越小。必然有一个状态,加油的效果与车辆减速的效果正好平衡,使得速度不再变化(此时还没有达到目标,因为比例控制还有输入)。
因此仅有比例控制,实际上是没法达到目标值的。可以设置一个积分量,只要偏差存在,就不断对偏差进行积分(累加),并反应在控制输入上。达到目标,积分值就不会再变动。这时,控制输入与外界因素的影响正好抵消(此时的输入是积分控制产生的,而不是比例控制)。
然而,外界影响往往是波动的,比如摩擦力、风速等,总是在变化。仅有比例控制和积分控制,实际上仍然无法让系统让车辆保持匀速,而是会在目标速度附近来回震荡。此时,我们可以观察车辆速度的变化率——加速度,只要车辆有了加速度,就像相反的方向施加作用,使其加速度趋近于0。只要被控制的量有了速度,就向相反的反向用力,抑制其变化,使其变化速度趋近于0。这就是微分控制。
PID 控制
比例(P)控制:比例控制是一种最简单的控制方式。控制器的输出与偏差成比例关系。当仅有比例控制时系统输出存在稳态误差。
积分(I)控制:控制器的输出与偏差的积分成比例关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
微分(D)控制:控制器的输出与输入偏差信号的微分(即偏差的变化率)成正比关系。
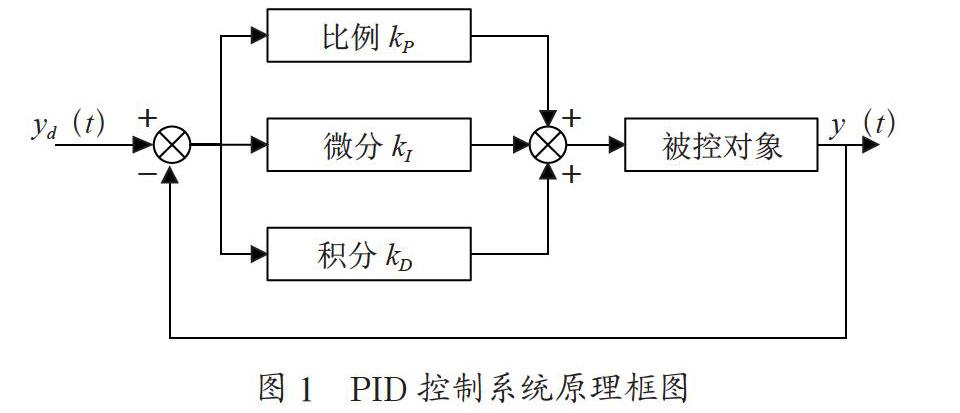
比例控制考虑当前的偏差,积分控制考虑过去的偏差,微分控制是考虑将来的偏差。这里的将来是指系统中存在较大惯性组件(环节)或有滞后组件,其变化总是落后于偏差当前的变化。
参考
本文由 晓楼 创作,采用 知识共享署名4.0 国际许可协议进行许可。本站文章除注明转载/出处外,均为本站原创或翻译,转载前注明出处